Flight tracking technologies used by DroneTB
Otus Tracker

The Otus Tracker from RCBenchmark uses active laser scanning developed for the Virtual Reality headset industry. It is capable of fast and accurate measurement of position and attitude.
Vicon motion capture camera system

The Vicon camera system is used in the movie industry for motion capture and object tracking. It uses reflective balls placed on the aircraft.
Pixhawk 2.1 with Cube sensor pack and HERE+ GPS

The Pixhawk 2.1 by ProFiCNC is DroneTB's flight controller. It is fitted with an upgraded Cube inertial sensor pack, and HERE+ GPS for optimum attitude and positioning.
FAQs
What products can be tested with DroneTB?
DroneTB is designed to test commercial aerospace products such as Attitude Indicator cockpit displays, and Attitude Heading and Reference Systems (AHRS) units. Other products such as Air Data Computers can also be evaluated. DroneTB can also be used to compare the performance of motors, propellers and flight controllers used in the drone industry.
How does DroneTB work?
DroneTB uses a combination of data gathered from optical and inertial measurements to compare against the performance of the Unit Under Test.
Indoor flight testing uses accurate instantaneous readings from optical tracking systems. The Otus tracker system from RCBenchmark is an adaptation of virtual reality headset tracking technology, which uses scanning lasers to determine the position and attitude of DroneTB. The Vicon tracker system uses reflective balls positioned on the aircraft to perform motion tracking similar to that used in the movie industry.
Outdoor flight testing uses data from the DroneTB's own Pixhawk 2 flight controller, to allow longer flight paths. In order to ensure accuracy, DroneTB will periodically fly through a 'gate' section containing the optical tracking systems.
Why not use an off-the-shelf drone?
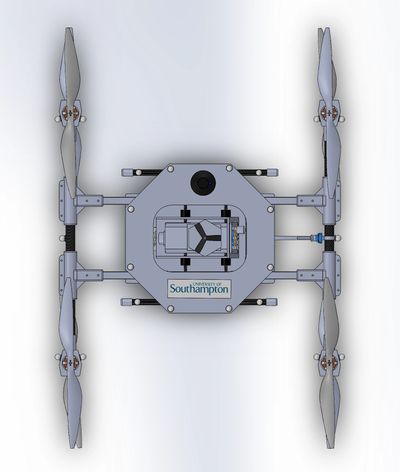
Most off-the-shelf consumer drones are designed to carry photography equipment, typically underneath the drone. DroneTB was designed around the platform containing the Unit Under Test, to offer the best mounting position, and vibration damping.
Wouldn't the drone need to be as fast as a real aircraft?
No, not for the majority of manoeuvers listed in the AHRS Minimum Operational Performance Standards, which require turns, descents, and accelerations rather than top speed. The purpose of DroneTB is to shorten and de-risk the product development phase, but ultimately testing on the target aircraft will always be required.
Why not use a flight simulator?
A full-motion flight simulator is designed to convince a human, using the natural force of gravity and visual cues. It is not a true representation of the forces experienced in dynamic flight.
Why not use a racetrack, roller-coaster, centrifuge, boom arm, turntable, pendulum, etc...?
DroneTB is capable of all of these movements. Each of these tests would require a different piece of hardware, which would be limited to a fixed, narrow range of motion. DroneTB allows the flexibility and adaptability to cover the majority of possible ground-based tests, in addition to tests which would be impossible to perform on the ground.
Photo Gallery








Autonomous Vehicles Laboratory
